
The purpose of this study was to determine the difference, if any, in the mechanics of legs only swimming while utilizing the two different designs of dive fins.
INTRODUCTION
In scuba diving there are two kinds of dives, the dives you remember and the dives you remember enjoying. The dives you remember are the dives in which you fell behind your dive group all day, your legs were tired and cramped, and a half day dive trip felt like it lasted two weeks. Whereas the dives you remember enjoying are the dives you remember seeing vibrant colors of a Princess Parrot fish, the clarity and almost bath like temperature of the water, and the fact that you were down all day, yet it seemed to last only minutes. There is one essential piece of dive equipment that will mean the difference between the dive you remember and the dive you remember enjoying, that’s the dive fin!
There are many different dive fins out there, but most of them are just variations on the same theme. There is however a dive fin out there that has broken away from that theme and set itself apart in the diving industry, the Force Fin. Most of the fins on the market today are considered to be conventional in design, in that they utilize a flat blade shaped surface to provide propulsion, as well as an enclosed toe foot hold with a heel strap as a means of securing the foot. Due to enclosing the toes in the foot hold, the foot is forced into extreme plantar flexion on the downward power stroke phase of the swim kick. This forced, extreme plantar flexion places an intense ballistic strain on the tibialis anterior, extensor digitorum longus, and extensor hallucis longus muscles. This also isolates the muscles of the lower leg into providing the primary power necessary for proplusion.
The Force Fin does not utilize a conventional fin design. But rather incorporates a blade surface that is shaped like the tail on a whale, as well as an open toe foot hold that rests across the top of the instep of the foot and is secured with a heel strap. By leaving the toes exposed and securing the foot hold across the instep, it does not force the foot into extreme plantar flexion. This also isolates the rectus femoris, vastus lateralis, vastis intermedius, and the vastus medialis muscles into providing the primary power for propulsion in the downward power stroke phase. The fin is designed so that while in the prone swimming position, the tips of the fin are pointed down. The fin is also designed to flex upward on the downward power stroke of the swim phase and then snap back to its original position during the upward recoil phase of the kick.
This design provides propulsion in both phases of the kick, instead of just in the downward power stroke phase. Due to gaining propulsion in both phases of the kick, the diver needs only to imply a simple flutter kick to sufficiently propel him/her self through the water. The purpose of this study was to determine the difference, if any, in the mechanics of legs only swimming while utilizing the two different designs of dive fins. Both intermediate and pro models of the conventional and Force Fins were utilized in this study.
DESIGN AND SAMPLE
Using a single subject, two category, two variable design, the study was conducted in a closed environment pool at San Diego State University. The subject swam, with legs only, from left to right in front of a viewing window in the side of the pool, where he was videotaped by a camera set up in the viewing room. He was given a rest between each trial and a rest period in which he changed into another pair of fins. The subject first swam with the intermetiate Original Force Fin, past the viewing window for a total of four trials. He then changed into the intermediate conventional fins and completed the same number of trials. The subject then swam in the Pro Model Force Fin for a total of four trials. Lastly the subject swam in the pro model conventional fins for a total of three trials.
MEASUREMENT
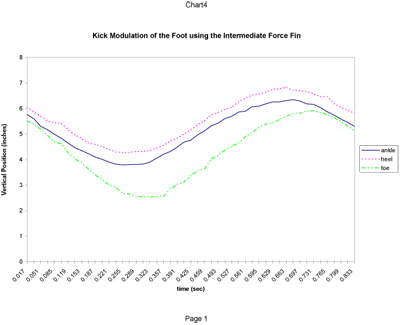
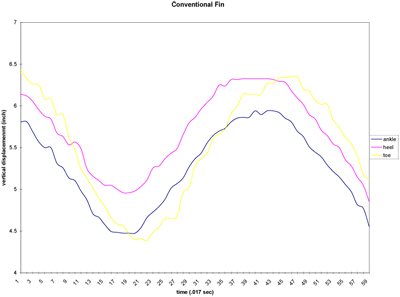
A biomechanical analysis software program called Peak5 was utilized to digitize the captured video footage. Once the video footage had been digitized, again using the Peak5 system, it was analyzed for range of motion, acceleration, and velocity of the, right and left, joints of the hip, knee, and ankle. The lower body was also broken down into separate points. Those points were the right hip, right knee, right ankle, right heel, right toe, left hip, left knee, left ankle, left heel, and left toe. Numerical and graphical data were both obtained.
ANALYSIS
A direct comparative analysis was run on the data collected. The data was separated into two groups and then analyzed. The groups were intermediate fins and pro model fins.
RESULTS
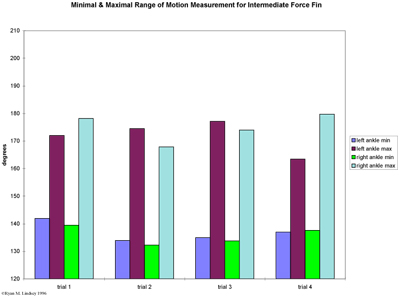
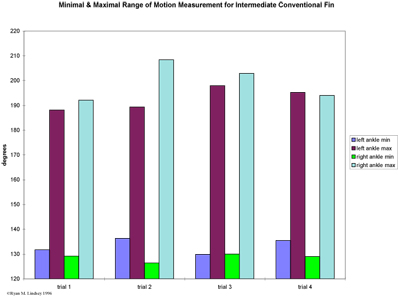
The results of the analysis show that there is a definite change in mechanics when comparing the conventional fin design to that of the Force Fin. By isolating both the minimal and maximal points in the range of motion (ROM) of the ankle, I was able to show that at the intermediate level there was an overall ROM of 59.32 in the left ankle and 70.71 in the right ankle while using the conventional fins. This corresponds to a 32.96% of the total ROM of the left ankle joint and a 39.28% of the total ROM of the right ankle joint. However, when using the Force Fins there was an overall ROM of only 34.80 in the left ankle and 39.17 in the right ankle. Resulting in 19.33% of the overall ROM of the left ankle joint and 21.76% of the overall ROM of the right ankle joint.
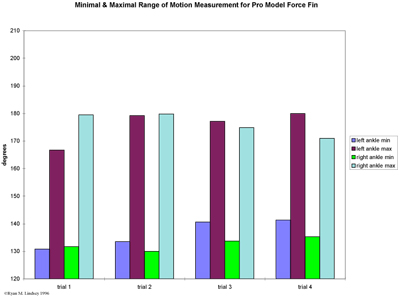
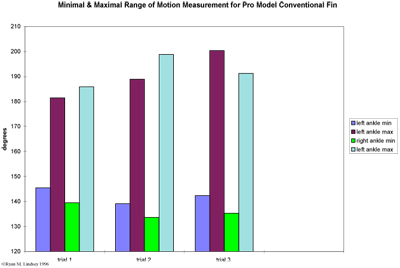
At the pro model level there was an overall ROM of 47.92 in the left ankle and 55.82 in the right ankle using the conventional fins. Equating to 26.62% of the ROM of the left ankle joint and 24.23% of the ROM of the right ankle joint. Although, when using the Force Fins there was an overall ROM of only 39.18 in the left ankle and 43.61 in the right ankle. This corresponds to 21.77% of the overall ROM of the left ankle joint and 24.33% of the overall ROM of the right ankle joint.
When comparing the minimal and maximal end range of motion of the conventional and Force Fins at the intermediate level, there is a difference of 11.62% in the left ankle and 13.57% in the right ankle. The end ranges of motion for the conventional fins were 7.05% beyond the total plantar flexion in the left ankle and 10.76% beyond total plantar flexion in the right ankle. At no point in the study did the Force Fin exceed the 180 mark of plantar flexion.
At the pro model level, the difference in the end range of motion was 8.05% in the left ankle and 8.72% in the right ankle. The end ranges of motion for the conventional fins were 5.69% beyond total plantar flexion in the left ankle and 6.65% beyond total plantar flexion in the right ankle. Again at no point in the study did the Force Fin exceed the 180 mark of total plantar flexion.
CONCLUSION
From conducting this study I have concluded that when I compared the mechanics of swimming with legs only conventional fins to the mechanics of swimming with Force Fins, there is a definite difference. The difference results in a definite change in mechanics. I have also concluded that the conventional fin, at both intermediate and pro level, force the joint of the ankle beyond the natural end range of motion, resulting in a ballistic strain of the tibialis anterior, extensor digitorum longus, and the extensor hallucis longus.
SUMMARY
This study has produced far more insight into the mechanics of legs only swimming than has been reported in this paper. It has laid a path for the examination of velocity and acceleration of the joints involved with legs only swimming. It has also laid a path for the examination of the range of motion of the kicking phase and how large or how narrow it should be for maximal efficiency. These are a small sample of the possible avenues of study that can be undertaken using the data that has been generated from conducting this study.
Ryan Lindsey, M.A.
Department of Exercise and Nutritional Science
San Diego State University
Our best selling products:
-
 Comfort Instep$37.95
Comfort Instep$37.95 -
 Bungie Heel Strap Replacement KitPrice range: $47.95 through $74.95
Bungie Heel Strap Replacement KitPrice range: $47.95 through $74.95 -
 Nylon Heel Strap KitPrice range: $39.95 through $57.95
Nylon Heel Strap KitPrice range: $39.95 through $57.95 -
 ORIGINAL FORCE FINPrice range: $359.95 through $379.98
ORIGINAL FORCE FINPrice range: $359.95 through $379.98 -
 PRO FORCE FINPrice range: $389.95 through $429.95
PRO FORCE FINPrice range: $389.95 through $429.95 -
 SLIM FIN$319.95
SLIM FIN$319.95 -
 FLOAT TUBE FORCE FINPrice range: $359.95 through $389.95
FLOAT TUBE FORCE FINPrice range: $359.95 through $389.95 -
 Heel Strap Wrap$19.95
Heel Strap Wrap$19.95 -
 Foot Pocket Strap for Float Tube Force Fin Adjustable Force Fin and Rip Force Fin$20.25
Foot Pocket Strap for Float Tube Force Fin Adjustable Force Fin and Rip Force Fin$20.25
You state in an earlier post from another user the size of the ForceFin is in/on the heel – where exactly or about on the heel? I held them outside in the sun hoping to spot it.
Thanks
Henry
The size is where your heel sits in the fin. If difficult to see it may have worn down. Move back and forth in the light to see if it is still there subtly.